AKD Drive
Connection Modes
![]() "Integrated development environment"
An integrated development environment is a type of computer software that assists computer programmers in developing software.
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger is connected to the controller and operating in one of two functional modes:
"Integrated development environment"
An integrated development environment is a type of computer software that assists computer programmers in developing software.
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger is connected to the controller and operating in one of two functional modes:
- Online Configuration Mode
- Project Running on the Controller
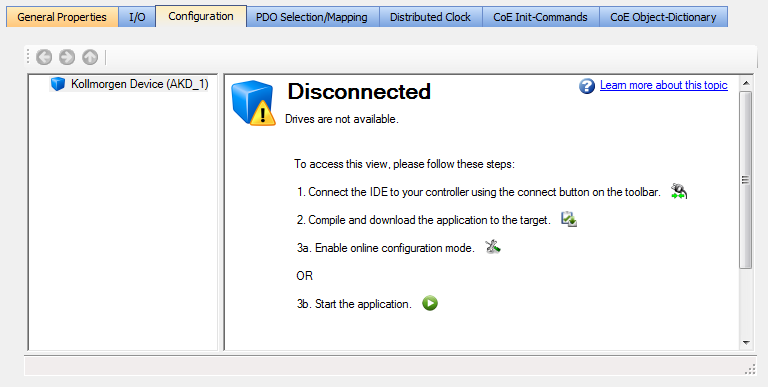
If the controller is not operating in one of the above modes, then the AKD(s) configurations are not accessible. The Configuration tab will indicate the AKD is Disconnected:
In Online Configuration mode parameters are updated directly to the AKD with EtherCAT![]() EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs is in Pre-Operational mode. When you modify the value of a parameter, a command is sent to the drive and the corresponding parameter is updated.
EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs is in Pre-Operational mode. When you modify the value of a parameter, a command is sent to the drive and the corresponding parameter is updated.
Project Running on the Controller
When a project is running on the controller, parameters are updated directly to the AKD with EtherCAT in Operational mode. When you modify the value of a parameter, a command is sent to the drive and the corresponding parameter is updated. Beware that your PLC![]() "Programmable Logic Controller"
A Programmable Logic Controller, PLC, or Programmable Controller is a digital computer used for automation of industrial processes, such as control of machinery on factory assembly lines.
Used to synchronize the flow of inputs from (physical) sensors and events with the flow of outputs to actuators and events application is running and can also read or write parameters to the AKD.
"Programmable Logic Controller"
A Programmable Logic Controller, PLC, or Programmable Controller is a digital computer used for automation of industrial processes, such as control of machinery on factory assembly lines.
Used to synchronize the flow of inputs from (physical) sensors and events with the flow of outputs to actuators and events application is running and can also read or write parameters to the AKD.
-
-
An AKD drive cannot be deleted while it is connected.
-
-
The AKD drive leave Online Configuration mode and start an the application if you start an application while the drive is in that mode.
-
-
Important! Before leaving Online Configuration mode (either by clicking the Online Configuration button or clicking the Start button when the device is in Online Configuration mode) you should ensure the following conditions exist.
- Drive is not enabled
- Service motion is not enabled
- Auto-tuning is not enabled
Recommendation: Clicking on the Disable button will force the above scenario.

AKD Configuration According to EtherCAT State
The drive configuration can only take place when EtherCAT is in the following state: Pre-Op or Op.
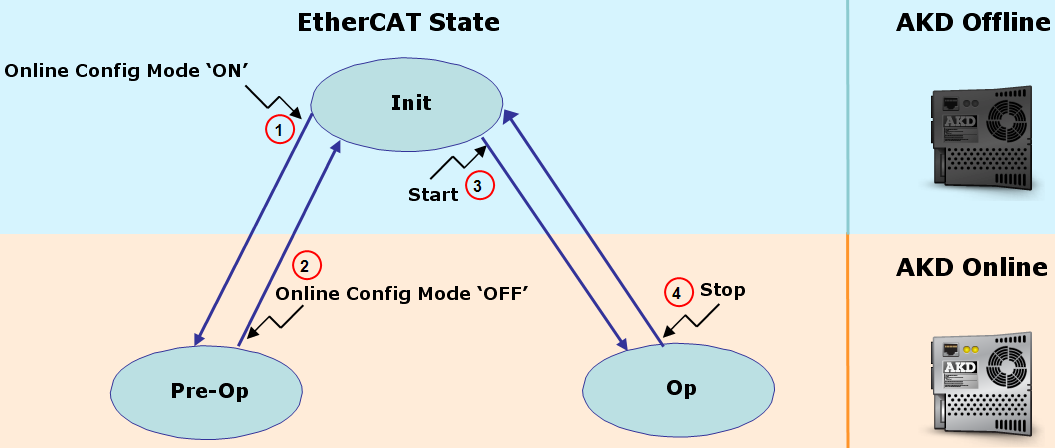
Figure 5-65: AKD Configuration According to EtherCAT State
| Action | Name | Description |
|---|---|---|
| 1 | Online Configuration Mode "ON" | Online Configuration Mode (to see where you can access this button in the KAS IDE, see "Online Configuration Mode") Sets the EtherCAT fieldbus to the Pre-Op state and allows AKD configuration (for procedure, see "Configure the AKD2G/AKD Drive") |
| 2 | Online Configuration Mode "OFF" |
Sets the EtherCAT fieldbus to the Init state and does not allow AKD configuration. All AKD drives are disconnected from the IDE. |
| 3 | Start the Project | Sets the EtherCAT fieldbus to the Operational state 1 (to see where you can access this button, see "Menus and Toolbar Overview") This will start the application program running and allows AKD configuration (with some restrictions for the views: Service Motion and Performance Servo Tuner) |
| 4 | Stop the Project |
This step stops the application from running, sets the EtherCAT fieldbus to the Init state, and does not allow AKD configuration. All AKD drives are disconnected from the IDE. |






